2007 年,義大利的工業設計教授馬力歐.泰迪(Mario Taddei)出版了一本書,名叫「圖解達文西機器人」(Leonardo da Vinci's robots)。這本書從達文西眾多的手稿中抽絲剝繭,重建了傳說中達文西設計的三種自動機械,分別是自走車、機器獅和機器士兵。

這三項發明在達文西的手稿中並沒有專門的篇幅介紹,而是馬力歐.泰迪利用分散的設計圖,以及其他歷史資料的補述(其中的機器獅更是只有文字說明而已),不藉由現代的技術和材料,一點一滴在 Leonardo3 工作室組合拼湊出來的。
馬力歐.泰迪在書中盛讚達文西,指出他在描述、繪製和工程方面的能力不僅同時代的發明家難以匹敵,即使到了現代,仍然沒有人能超越他的成就。
話雖如此,達文西的一生中並沒有公開發表任何書籍,也沒有花費心力出版作品,雖然有些手稿整理得很整齊(如馬德里手稿),看起來隨時可以出版,但他仍舊沒有出書的意願。作者替達文西找的託辭是他太過沈迷於研究,而且認為在當時只有木版印刷的年代,出版會浪費達文西太多時間,所以才作罷。

因此馬力歐.泰迪認為,要是這些研究成果能公諸於世,廣為流傳,現代的機械與工程學的發展不會僅限於此,這也難怪看過手稿的科學家都會佩服達文西的聰明才智。
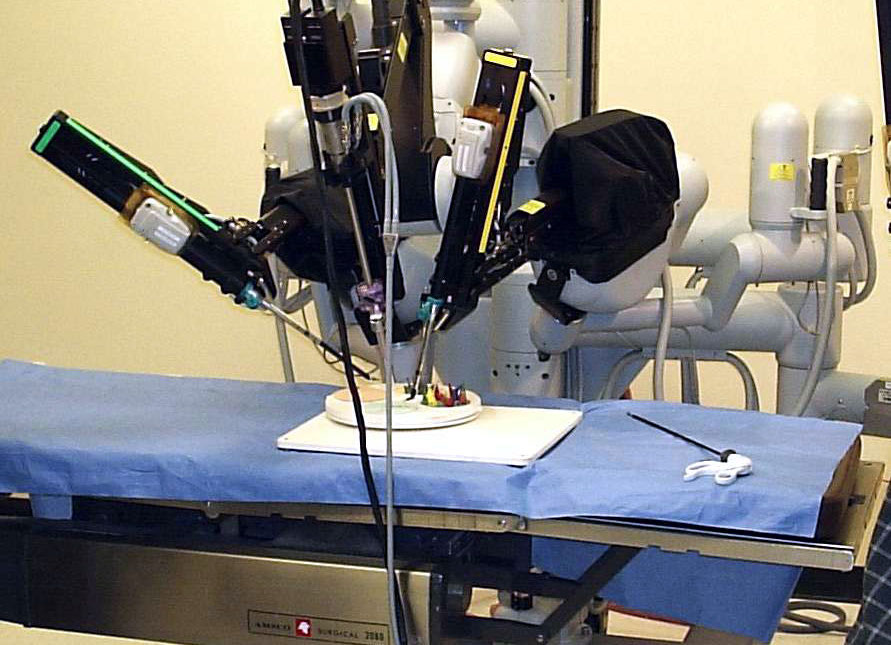
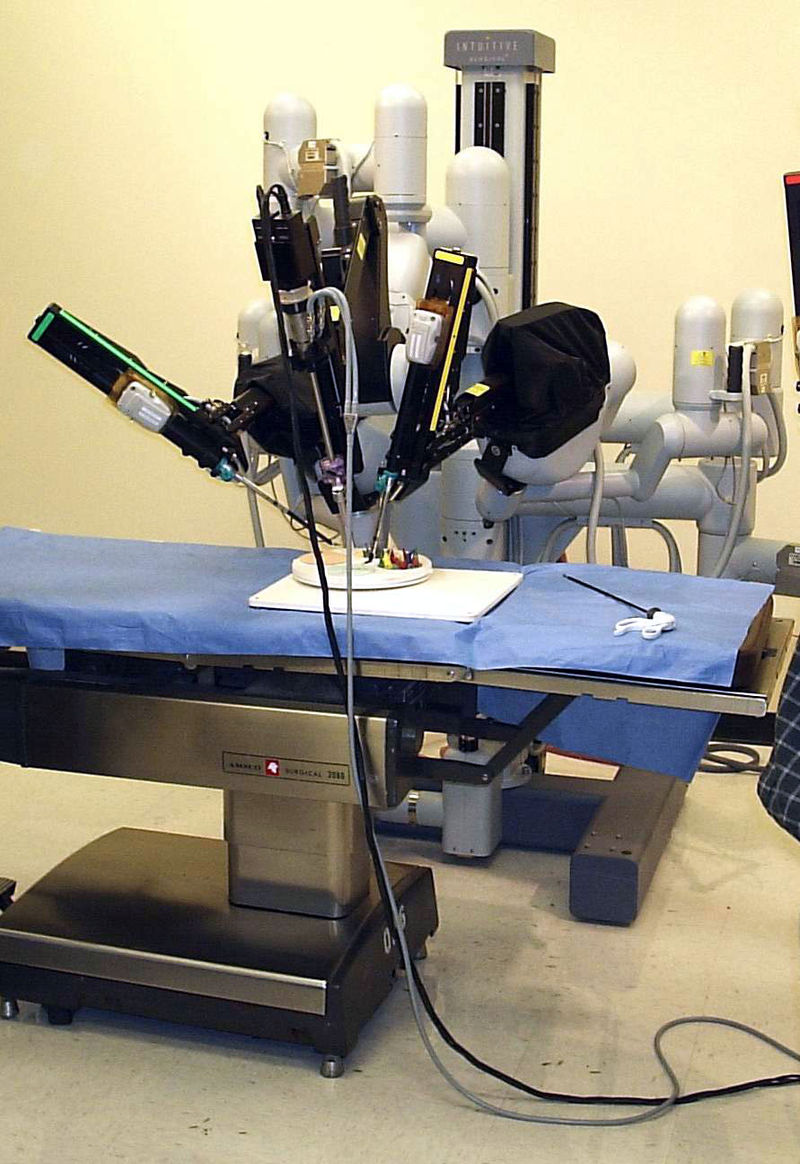
時至今日,在各個領域上,達文西的名字常和最高級的產品相提並論,例如美國航太總署送到火星上的探測車,曾被命名為「李奧納多」(Leonardo);而這幾年在微創外科(minimal invasive surgery,意即是傷口小,能使病患恢復較快)相當熱門的機器人手臂系統,英文名就直接叫 Da Vinci Surgical System,負責研發此系統的公司更不諱言,這套系統的靈感就是來自於達文西的機器人。
不過微創技術的發展,並不像達文西的手稿一樣能夠「藏私」,反而由於日新月異的材料科學技術,加上醫師間不吝分享的氛圍下,短短一百多年的歷史,就已收穫了不少豐碩的成果,而且還在持續進步當中。
自文藝復興以來,人體解剖學的研究慢慢達到一定的水準,外科醫師在十八、十九世紀便逐漸往解剖病理學發展,而且由於當時的麻醉學還未臻完善,因此希望檢查或手術能用最小的傷口,達到觀察身體、甚至取出病灶的想法,就開始在外科醫師的心裡萌芽,首先發難的便是泌尿外科醫師。
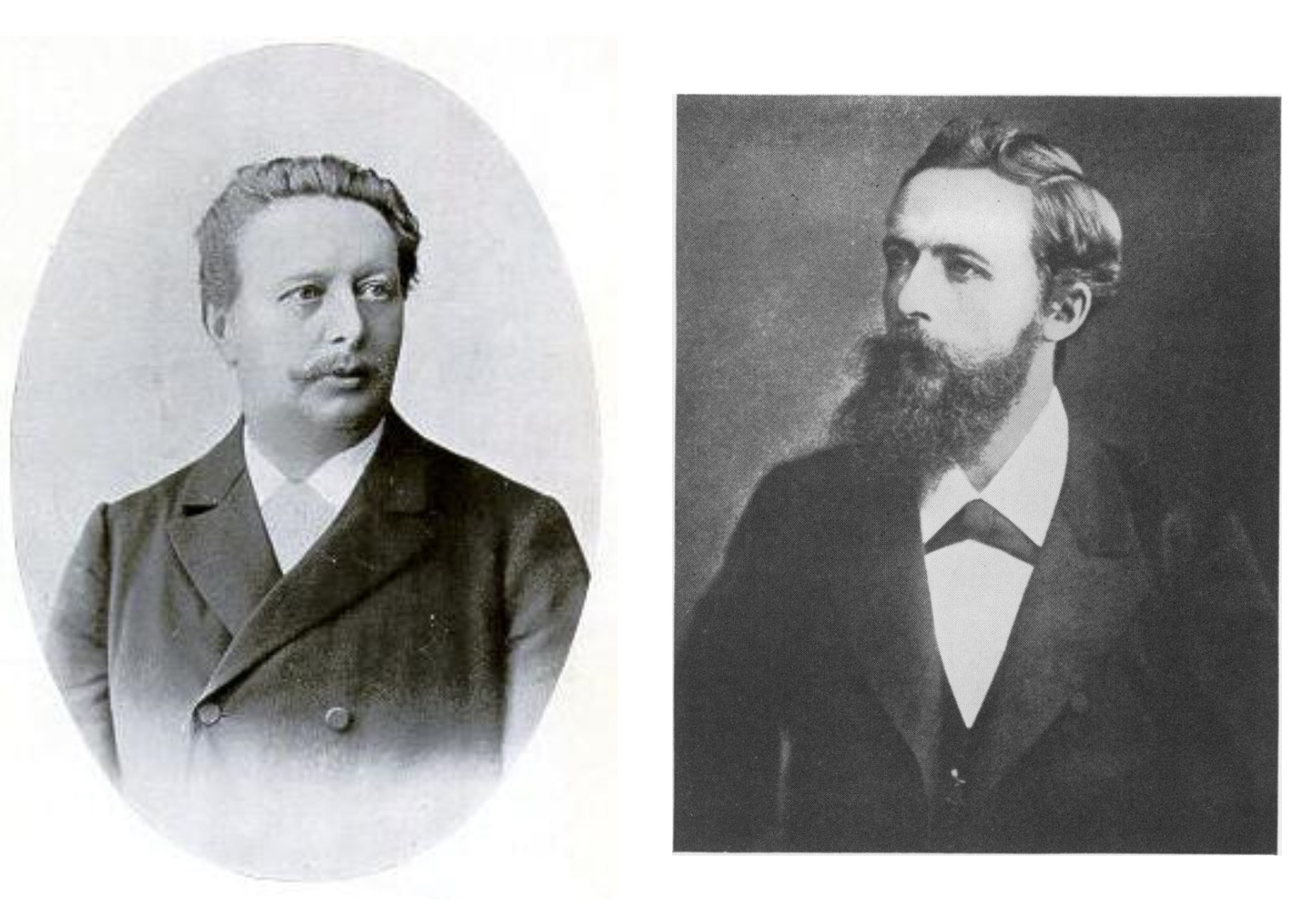
1826 年,在巴黎的醫師 Pierre Segalas 發明了膀胱鏡,但可惜最初的設備並無搭配光源,所以並沒有引起風潮。直到 1879 年,維也納的 Maximilian Nitze 將膀胱鏡加上了光源(使用加熱的鉑絲),並且多了一些有角度的鏡頭,這套他所設計的設備,即使百年之後看來,依然是非常精緻。
Maximilian Nitze 在十年後整理自身累積的臨床經驗,出了一本德文專書名為 Lehrbuch Der Kystoskopie (中文譯為膀胱鏡手冊),此時的他便能夠使用膀胱鏡切除膀胱的原位癌。
在 Maximilian Nitze 發明自帶光源的膀胱鏡,不到兩年之內,維也納的外科醫師 Jan Mikulicz-Radecki 也發明了硬式胃鏡,這兩人的發明引領了日後醫療技術的進步──內視鏡和微創手術。
膀胱鏡發明後,有些腦筋動得快的醫師開始把它利用在其他醫療領域。1910 年在瑞典斯德哥爾摩的醫師 Hans Christian Jacobaus,是歷史上首次利用膀胱鏡檢查腹腔臟器、肋膜腔和肺臟;八年後,在東京大學的高樹(Takagi)教授,也在膀胱鏡的基礎上,發展出骨科可用的「關節鏡」雛形。
接下來幾十年,微創手術的發展稍微停滯,而內視鏡的檢查則是給病患帶來更多福音。由於內視鏡的設計變得愈來愈小、愈來愈軟,病患接受檢查時,相對地比起以往較輕鬆自在,甚至轉變成門診的形式,不需要像過去一樣住院。
不過在 1980 年代之後,由於光學技術的進步,內視鏡的前端不僅有光源,更附有鏡頭,加上一些精巧、細小的器械發明,使得用內視鏡進行微創手術的模式開始蓬勃發展,從早期只是膽囊、闌尾的切除,到如今不僅能切除腸胃道腫瘤、婦產科手術,也可以用於肺部病灶接除的手術,這幾年也流行起以微創的方式進行心臟的瓣膜手術。
至於以機器人手臂來從事微創手術的概念,也不過是這近二十年光景才發生的事。
大約在 1982 年,機器人手臂僅只和電腦斷層合作,以 3D 立體定位的方法對顱內的病灶實施切片檢查;在 1992 年,也曾經有機器人手臂置換髖骨關節的報告。不過,早期發展機器人手臂的醫療器材公司都是各玩各的,不像研發內視鏡的模式,有一個可供依循的標準。
然而,如同所有商業整併的行為一樣,Intuitive Surgical 公司在二十一世紀初一統江湖,合併了所有醫療用的機器人手臂公司,也整合了相關的技術,開創達文西機器人手術系統。
與用內視鏡輔助的微創手術不同,使用機器人手臂從事的微創手術,主刀的醫師並不需要上手術檯,只要助手在手術檯上,架設好內視鏡和手術器械穿過人體皮膚的步驟,然後把它們通通與機器人手臂連接,醫師只需要在一旁的工作站,透過 3D 立體螢幕指揮機器人手臂移動,就可以完成手術。
筆者曾經至美國南卡萊納州修習機器人手臂的訓練,在工作站裡透過螢幕縫補豬心──老實說,真的有點像打電動玩具。對於手持器械直接切開病人身體,或者是利用內視鏡執行手術的醫師而言,這樣的手術方法難免會有點心虛,因為並沒有感受到真實的回饋機制,醫師只能完全靠著螢幕的動作,揣摩自己力道的大小和移動的快慢。

但是,這也是機器人手臂的賣點,只要有合適的助手在現場架設好系統,即使病人遠在外太空,外科醫師也可以透過衛星通訊開刀,更遑論在地球上任一個網際網路可以到達的角落。
以上,雜亂地介紹完微創手術的發展,表面上看起來這樣的技術好像已經足夠成熟,不過事實上卻並非如此,不管是器材設計層面,或是人員訓練層面,仍然還有很多需要克服的地方,套句論語所說:「升堂矣,未入於室也。」要真正達到對病患最小的傷害,現在的我們可以說仍然是「小兒科」哩!
.jpeg)
本書仔細整理這些關於外科手術的種種史料,作者藉由輕鬆的故事,將始末娓娓道來,讓讀者重回醫學啟蒙的年代。







{kind=link}
{kind=link}
{kind=link}